
Nancy Marek was trekking through the forest, propane torch in hand, searching for invasive plants to remove when the thought occurred to her: “There’s got to be another way to do this.”
Invasive plants are a perennial problem in Connecticut. These plants can overtake an area, preventing native flora from thriving. This is a serious problem for the entire ecosystem since native plants provide food, shelter, and other benefits to native animals.
Marek, a Ph.D. student in the College of Agriculture, Health and Natural Resources, is a certified forester. During an internship with the Connecticut Department of Energy and Environmental Protection (DEEP), Marek went into the woods with a torch and burned invasive plants. The only other widely used removal tactic is applying chemical herbicides. Both methods pose a risk to surrounding flora and fauna, and the chemicals from the herbicides can have long-lasting negative impacts.
Additionally, these removal missions are dangerous for foresters. Invasive species like Japanese barberry provide an ideal habitat for ticks carrying diseases such as Lyme Disease.

Marek’s personal experience inspired her to develop a next-generation approach to invasive plant removal that uses drones, robots, and artificial intelligence.
“I wanted to create a way to be safe in the background while managing a robot that can remove invasive plant species,” says Marek, who is earning her doctorate in the Department of Natural Resources and the Environment.
Marek named the project BirdHabitatBot. The name of the project emphasizes the importance of protecting native plants that provide habitats for birds, something Marek, an avid bird watcher, cares about deeply.
One particularly important habitat for birds is young forests, those between zero and 10-15 years of growth. These forests are commonly threatened by invasive plants.
“If you ever come across a young forest, it’s alive with the chitter-chatter of songbirds,” Marek says.
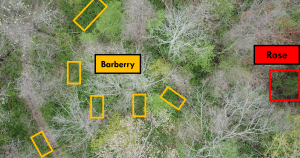
Marek’s project focuses on the two most detrimental invasive plants for Connecticut forests: Japanese barberry and multiflora rose.
Previous research has shown that there is a two-week window during which these plants leaf out and can be easily seen from aerial views. During this window, Marek used a drone to collect imagery. She then used deep learning to accurately identify Japanese barberry and multiflora rose in the deciduous forest understory, the layer of vegetation that grows between the ground cover and canopy. Her focus was on future applications in forestry with drones, deep learning techniques, and robotics. The National Science Foundation awarded her company a one-year grant to develop a robot prototype.
This is a novel approach to invasive plant removal.
“I’ve not seen anyone else working on this,” Marek says. “So that’s scary and exciting.”
“I don’t think that cutting the invasives will be the problem,” Marek says. “The issue will be getting from one location to the next and not getting the robot destroyed in the process.”
Marek received support to commercialize this technology through Accelerate UConn. The program helped Marek understand how to communicate her vision to potential investors.
“Accelerate UConn was a godsend in that regard,” Marek says. “To help me understand it’s not just the idea, you have to sell your idea to others.”
BirdHabitatBot is a promising solution to a serious ecological concern in the state.
“You can’t fix all the problems,” Marek says. “But if this is one problem I can at least make a dent in, that would be glorious.”
Follow UConn CAHNR on social media

