As the oft-quoted saying goes, shoot for the moon. Even if you miss, you’ll land among the stars.
An interdisciplinary team of UConn undergraduate students took a bigtime shot at the moon last semester, but it landed them right where they aimed – as finalists in the 2022 NASA BIG Idea Challenge.
They’re spending the rest of this semester, the summer, and into the fall designing and building their prototype for a lunar rover, then testing its ability to navigate extreme terrain and harsh conditions similar to the moon’s south pole. Their work is being supported by $150,000 in project funding from NASA.
![]()
A chemical engineering and material sciences and engineering major, Theresa Nosel ’22 (ENG) is the UConn team’s leader. Nosel, who has completed multiple internships at the NASA Glenn Research Center in Ohio and the NASA Stennis Space Center in Mississippi, approached her senior year looking for a way to share her NASA experience with other UConn students.
“I was encouraged by one of my friends to apply for my first program, and it took a lot of encouragement, because you think of NASA as the most brilliant minds, and I was like, ‘That’s not something I could do,’” she says. “And then I applied for my first thing, and it just snowballed into more and more and more and more programs with them. And I just wanted to open it up to new people.”
Nosel learned about the annual Breakthrough, Innovative and Game-Changing, or BIG, Idea Challenge during her first NASA internship in 2019. Now in its seventh year, this university-level competition invites students to tackle some of the most critical needs facing space exploration. Students propose, design, develop, and demonstrate their technology in a project-based program over the course of a year and a half.
The challenge invites teams to initially create and submit concepts and proposals at the end of September. Teams have several months to generate ideas and plans before submitting a formal written proposal and a short video in mid-January.
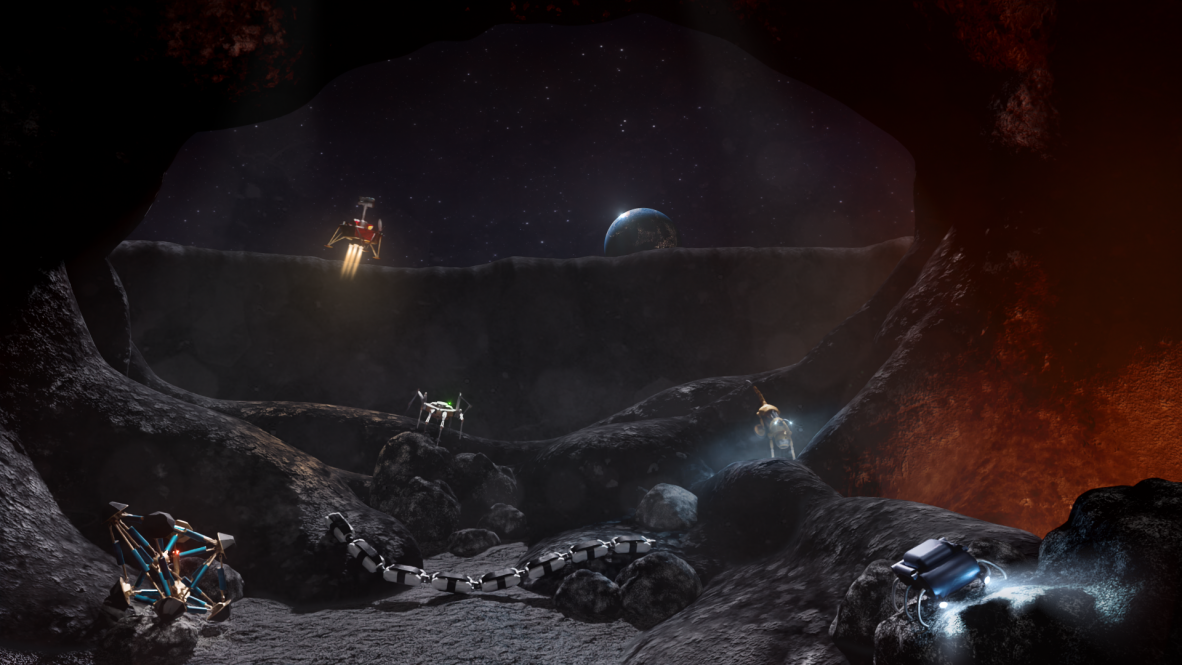
For the 2022 challenge, participants were asked to develop new modalities for rovers to use in navigating the more challenging terrains on the moon, and potentially beyond.
“Traditional wheeled rovers cannot reach many of the unexplored areas of the moon and Mars,” organizers wrote in announcing the challenge last fall. “Student teams….will develop innovative and cost-effective robots that go beyond wheeled rovers capable of exploring other worlds.”
The challenge is aligned with NASA’s Artemis program goals of using innovative technologies to explore the moon’s surface, and then to use what is learned in that exploration to help guide manned missions to Mars.
This year, seven finalists were selected and given funding to fully develop and build out their technologies. This is the first team from UConn to ever compete in the BIG Idea Challenge, let alone the first to be funded.
The challenge’s brief and the prospect of designing and constructing a lunar rover was exciting for Nosel, who began building her team by presenting to a few classes and advertising an informational session in the Daily Digest.
“The Daily Digest is where I got the most response,” she says. “People just started emailing me. People came to the little info session that I had, and we formed a team. And then just more and more people started joining.”
“I just saw it, and I emailed instantly,” says Hritish Bhargava ’23 (ENG), an engineering physics major and a member of the first Stamford Startup Studio cohort. Bhargava was one of the few who knew about the BIG Idea Challenge before seeing Nosel’s Daily Digest post.
Other students weren’t familiar with the challenge, but were intrigued by the idea of working on a NASA project.
“It was our second week, and we were just literally diving into the Daily Digest, clicking on every single link,” says first-year student Kalin Kochnev ’25 (ENG), a computer science and engineering major. “It was sort of lucky for me – like right place, right time – and I’m really happy to have joined. It’s been super awesome.”
With a background in social sciences, Sabrina Uva ’22 (CLAS), a human development and family sciences major and also a member of the Stamford Startup Studio, saw joining the challenge team as a way to build new skills and get out of her comfort zone.
“I’m working with emerging technologies now and working with innovative solutions,” Uva says, “and I thought this was a great opportunity to apply my background from social science and my work as a product manager to really create innovative solutions in this project.”
All together, 15 undergraduate students from various backgrounds came together to form the initial team. Their first task as a group was to conceptualize their modality – something easier said than done, especially with the complications of the global pandemic that initially limited them to virtual meetings and collaboration.
“It was a bit of a rocky start in the beginning,” says Kochnev, who led the team’s product design efforts. “I think people are really afraid of sharing their own ideas, especially when you don’t know the people you’re working with.”
The team initially worked on a soft-body robotics concept composed of balloons and motors that would move almost like a wheel. They worked on that design until the end of October, when they were finally able to have an in-person meeting on Halloween night.
“We changed so much,” says Vihaan Shah ’25 (ENG), a first-year computer science major, about the outcome of the meeting. It was a critical turning point where the team began to recognize some flaws in their complicated concept.
“If you think about bringing a balloon to the moon, it would just explode,” explained Kochnev. “It’s just a vacuum, and the gases would try to expand, and it just doesn’t work.”
With that first design falling apart, and the clock ticking on the deadline to submit their proposal, members of the product design team were forced to quickly regroup and think on their feet, jumping quickly from concept to concept until they landed at their second and ultimately successful design, which utilizes a modality that morphs. The team believes this concept will give their rover huge advantages in navigating the highly variable terrain of the moon’s south pole.

“The morphing modality involves four appendages that function as quadruped mode, which allows the modality to walk, and then in tank mode, where it has tank-like movement, and then finally in a combination mode, which allows for any combination of appendages to conform to a leg or tank,” explains Uva. “What I think makes this design really unique is that it really is simple and also durable.”
That built-in simplicity – taking a leg and adding a tread to the bottom of it – is part of the design’s versatility, Nosel notes.
“It’s going to operate like a tank, and it’s going to operate like legs,” Nosel says. “We’re developing this for extreme lunar terrain, but you’re not always going to have extreme terrain. Sometimes, you’re just going to be going across a flat surface, and in those instances, you don’t really need some crazy, many-degrees-of-freedom contraption. You can just go across it like a tank. Tanks are energy efficient. They have excellent traction and a durable stability to them. Then, when you do go up and down these slopes, or maybe on more uneven terrain, you can change it to a leg or some combination of the two with the adaptable stability and obstacle avoidance that comes with it. So, it’s just extremely versatile.”
A simple concept, though, doesn’t always mean a simple process. The design took months of work – all while the students balanced their classes and other responsibilities – before their proposal began to come together.
“Probably the toughest part was CAD work, because it’s not collaborative, one person pretty much has to do it,” says Bhargava. “Conceptually, it’s easy to understand, it’s pretty simple, the prototype itself. The modality isn’t hard to see. But designing it is hard. We had a lot of discussion about suspension, and there’s not enough space in there, so you have to figure out some new way to put suspension in there. I hadn’t worked on something this extensive before. I’ve done other CAD work. I’ve done other projects engineering wise, too, but this was definitely a lot more painful than most projects – late nights, just doing CAD work.”
“Math is a significant part of robotics,” says Shah. “The math behind a robot gets more challenging as your robot becomes complex. And I am excited to be working with the team to solve this problem.”
They’ll continue solving those problems over the course of this year as they prepare to present their morphing modality prototype in November to the BIG Idea Challenge judges at a forum in California. The team has named their rover design AMBER, which stands for Adaptive Morphing and Balanced Exploratory Rover, and in the first phase of the project, they will build a working prototype.
“Over the course of the next few months, we’re going to be working out design, exactly how to piece this together, how to wire it, how to program it, and that will continue throughout the entire project,” Nosel explains. “That’s the main point of the project, to deliver something that works.
Phase two, which begins in July, will involve testing and refining their design. Their proposal details a wide variety of testing terrains to put their rover through its paces. They’re designing and building a mini slope lab in Storrs, similar to one at NASA’s Glenn Research Center, to see how the rover navigates extreme slopes of 30 degrees. The team will also work with commercial businesses – like Caveman Cryotherapy in Farmington, where they can subject the rover to extreme cold, and the Bolton Ice Palace skating rink, where they can test how the modality operates on ice – as well as in the vacuum chamber at the National Technical System’s laboratory in Massachusetts, to see how the prototype operates a low pressures.
It’s an immense amount of work for the team.
“The challenge ahead is to bring this idea to life and put it through its paces in the face of several extreme lunar-simulated scenarios,” says Fiona Leek, an assistant professor-in-residence with the School of Engineering’s Materials Science and Engineering Department and one of the team’s faculty advisors.
Leek says that the team’s accomplishments thus far have been completely student driven, with intentionally minimal faculty involvement.
“No doubt the next few months will be very challenging,” she says. “Hopefully, they will also be exciting and a great deal of fun.”
The team is realistic about the amount of work ahead of them, but also excited about the potential applications of their technology, whether or not it ever actually lands on the moon.
“Even if ultimately this project isn’t the final one chosen by NASA, someone can use this product,” says Nosel. “Someone can use this modality, and we want to put it out as much as we can. Everything that we do becomes open source, so anyone can use it.”
Nosel notes that the team has lines of communication with Collins Aerospace and Peer Robotics about their concept, and is also very interested in connecting with additional companies. They have recruited additional UConn students to join the team and to help fill knowledge gaps that the team needs to be successful – the team has grown to 26 student members in the past two weeks.
They also hope that their efforts will encourage other students to aim for the moon, take risks, and attempt what might seem impossible.
“I’m basically the prime example of coming from a social science background onto a NASA team and really learning how to apply my expertise and my research and learning new skills,” says Uva. “I never imagined myself in this position.”
“Don’t be afraid of putting yourself out there,” says Kochnev. “Not knowing is probably the number one thing that I got out of this project. When you don’t know things, it’s extremely terrifying, because there are so many possible ways to go about something, you don’t even know where to start. And I think that’s something that is a really valuable skill, just being able to be comfortable with not knowing and being able to find the answers.”
Nosel, in particular, hopes their lunar rover adventure might inspire other students to consider how an agency like NASA could be a part of their future.
“We’re the first team to ever enter, but I don’t want us to be the last team,” she says. “I just want to really encourage other people to look into all the opportunities that are out there, and especially with NASA. Because I’ve been doing things with NASA now for four years, and they love students, and they are so incredibly supportive and collaborative with students. It’s an incredible organization to be doing projects for, and even if it’s not this one, there are so many others out there.”
To follow along with the UConn BIG Idea Challenge Team’s progress on their AMBER rover, follow them on Instagram @AMBER_UConn.